A GUIDE TO QUADRUPEDS’ GAITS - Walk, amble, trot, pace, canter, gallop

INTRODUCTION
“Adaptation is the universe’s way to keep things on a level playing field.”
My goal with this article is to put in one place a reference guide on quadrupeds’ gaits and their variations. I encourage you to read the whole piece at least once and to come back to a gait’s section when you need it. You’ll find an analysis of footfalls of the most common quadrupeds’ gaits, including which animals each gait suits best. Here, I analyze all six gaits in the order of the speed they provide the animal: walk, amble, trot, pace, canter, and gallop. Each gait has its unique characteristics, from the frequency of steps to the footfall patterns to the number of limbs off the ground at any given time (with increasing air time as speed increases). Each gait shares traits with the previous and following gait so the transition between gaits is smoother. For example, the amble can be seen as the average between the traits of a walk and a trot.
But before we dig into the details of how it works and why we need it, I need to quickly address the obvious why: Why do we move?
Animal locomotion, especially fast movement, can be extremely energy-consuming, so it wouldn’t have evolved if it weren’t indispensable. As with most things in the animal kingdom, it usually comes down to three main motivations: find food, avoid becoming food, and reproduce. Where we find our food source, how fast our lunch is moving, and how we protect ourselves from danger can drastically influence the way we move. Think of the difference between a monkey, a horse, and a turtle. Ultimately, if something we need isn’t exactly where we are, we need to go where it is. But if this was our only concern, we wouldn’t worry so much about how fast we get there. Speed, for the most part, becomes vital only when predators enter the picture, at least a speed relative to the predator’s. Animals who find safety inside their shells like turtles don’t need to move fast and can save a lot of energy that way. If your safety comes from outrunning whatever is chasing you, being faster means living another day. If you are the predator on the chase, outrunning your prey means feeding yourself another day, so both sides had evolutionary motives to achieve faster speeds.
Not all creatures move the same way; some gaits are better adapted to keeping up over longer distance, others for explosive movement and sprinting.
If we were to create the optimal way of moving, what would we be looking for in a gait?
Clearly, Mother Nature had two main concerns in evolving solid gait styles: how fast can we move and how energy-efficient is that movement. Especially for predators, if they expend more energy than they stand to gain by reaching the food, moving wouldn’t be worth it.
Although there are definite similarities between almost all quadrupeds’ gaits, each species adds its own flavor to them. Carnivores and herbivores both have strengths and weaknesses in considering optimal movement. Because digesting grass requires a lot of work, herbivores’ gastrointestinal tracts tend to be longer, with the consequence that their trunk has evolved to be quite rigid to sustain it, thus limiting the length and speed of their stride. To compensate, most herbivores have relatively long legs with feet that are designed mostly for running.
Carnivores’ limbs, on the other hand, are usually multipurpose: for attacking/defending, climbing, and hunting. Their limbs are shorter in proportion to their body shape in order to increase control. In contrast to herbivores, carnivores don’t need extra energy to digest meat, so they have evolved a more flexible trunk that can open up the angle of the limbs and stretch the length of each stride, increasing the speed of the gallop.

Beyond that, every creature has a different stance; for example, while rabbits and mice tend to always keep their legs bent, heavier animals such as elephants would find that position exhausting. In mice, the energy cost is reduced and manageable due to their small size; it gives them the advantage of always being ready to jump and sprint at any moment, so the energy cost is negligible compared to the opportunity it affords. On the other hand, elephants barely bend their legs even when they are running and prefer to swing the legs like a pendulum. Different creatures have different needs.
Although these differences might sound trivial, they are worth considering in our analysis, and it is useful to understand the limits of each creature. Beyond the macro mechanical differences, there are anatomical similarities in the design of everyone’s legs that help us save energy and move around with freedom.
THE BEST WAY TO MOVE
“An evolutionary path along which an animal species changed progressively, increasing fitness at every stage, would not necessarily lead to the fittest imaginable structure.”
Locomotion in animals is made possible by the combination of muscles and bones. While bones are the structure that supports us, muscles are the engine that gets things in motion, and like engines, they need fuel. Our fuel is composed mostly of carbohydrates and fats, and together with oxygen, it transforms into energy that can be used by muscle cells to contract and manipulate the skeleton. Because we need the energy to move and we need to move to get the energy we need, it’s not surprising that locomotion and nutrition are so tightly intertwined. For an animal to be fit, there has to be a fine balance between the energy it gets from eating and the energy it expends moving. How do we build a structure that can have the speed and flexibility we need while conserving as much energy as possible? For the most part, we compromise.
When we think about a mechanical design in nature, we must remember that we are working within the limits of the evolutionary process. That means that each successive step must be more useful than the previous; we can’t take a step back with the intention of taking two forward in the future. We can’t magically put all the pieces together in the proper place at one time—we always need to build gradually and only move forward.
THE WHEELS THEORY
Evolutionary constraints partially answer the question of why we don’t all have wheels. Wheels seem the best choice; after all, they are very energy efficient, they function passively downhill and can keep a lot of momentum after the initial push. But if we take the time to get a closer look, we see that this argument falls apart rather quickly. Clearly, it would be almost impossible to create a freely rotating mechanism in the body using the system of bones and muscles that we already possess. Mechanically, it would be hard to set in place, even without considering the amount of friction and heat it would produce. We would also need to get to that result gradually, with every step of the way being useful.
But let’s say we could. Would it be worth it? Probably not. All the good attributes I listed about wheels are true, but only as long as we are either on man-made roads or relatively smooth terrain. The moment we found an obstacle in front of us, we would be in big trouble. With a bit of math, we can see that a wheel cannot climb an obstacle that is higher than the radius of the wheel itself. And forget about climbing trees or having a solid grip on branches. The alternative system (certainly less elegant than the wheel, but able to minimize energy expenditure while granting more versatility and freedom of movement) resembles a spring.
THE SPRING THEORY
Our muscles have incorporated spring-like systems that help us move around in an efficient way. The leg design is a versatile system that allows us to walk, run, jump, and climb. We move our bodies around by manipulating our skeleton like a puppet. Muscles move our bones in a lever system through contractions, and each muscle has a counterpart that can move the bone in the opposite direction. Muscles aren’t directly connected to bones; they attach to them through tendons, which offer a safety net to avoid overextending the muscle and help save energy. Muscles are very energy-hungry and, for the most part, depending on which type of lever is applied, can also be very energy-inefficient. We usually trade the extra energy used for explosive, fast movement.
Tendons’ role in locomotion is not to be underestimated though. Apart from connecting muscles to bones, they retain an elastic quality that in any gait helps recover some of the energy expended by the muscle to proceed to the next step, by extending when the limb is bent and compressing upon straightening the leg.

Horse leg taking a step—you can see the tendon (red line) stretching as the leg bends.
The kinetic energy produced by the muscles in the first part of the step is stored as elastic energy in the tendons to be used in the second part of each step. Contrary to muscle contraction, which is an active process and requires energy to fire off, the elastic properties of the tendons make them work passively. This dynamic is always present even though, depending on the type of gait, it comes into effect at different levels.
MAIN TYPES OF QUADRUPEDS GAITS
Quadrupeds can have different variations of gait based on a few variables: speed, personal preference, and/or human training. The analysis below of each stride will include a brief description of the gait with some important notes; the footfall analysis of the gait (the sequence in which feet touch and lift from the ground); a representation of the footfall and a reference of the gait; and the beats of the gait. If we listen to a quadruped’s gait, the beats are the times we hear contact with the ground during each stride. In a sense, it’s the rhythm of the gait. For example, if the animal hits the ground with two limbs at the same time, that would count as just one beat.
Each type of gait can evolve to another faster or slower gait. Some types of faster gaits are more favorable to transition into, depending on which gait the animal is coming from and the similarity of the footfall pattern. Not every animal is able or chooses to perform every gait, as in the case of the elephant, for example, whose weight and body shape preclude performing a gallop.
WALK
The walk is the slowest and most energy-efficient gait. The walk has a four-beat stride in quadrupeds in which each foot touches the ground at slightly different times. While walking, the animal always has two to three points of contact with the ground. During the walk, each hind foot alternates, replacing the front foot on the same side, switching, and repeating the same action on the opposite side. During the switch, the animal will necessarily have only two points of contact with the ground for a split second. Trained horses are more likely to place the back foot exactly where the front foot was, as this clean replacement tends to make the riding experience smoother for the rider. For quadrupeds, walking allows three feet to touch the ground, thus generating a highly stable gait. It helps tigers and other predators move slowly and silently while stalking their prey. In contrast, we bipeds are less stable and expend much more energy while trying to balance on one foot at a time. There can also be a diagonal version of an animal’s walk used primarily by tree-climbing animals, but we’ll analyze it further in the amble.
Example of a walk: The back left (BL) will move forward to replace the front left foot (FL). During the exchange, the FL anticipates the lift, leaving the animal supported on two legs until the BL is set. Then it repeats the process on the opposite side, moving the back right (BR) to replace the front right (FR). Focusing on moving one side at a time makes the animal rock slightly left and right, shifting his weight to balance on the currently steady side.
Footfall order: BL → FL → BR → FR


Source: https://youtu.be/Tec5bp90C8k

Slow motion
AMBLE
Unlike the common definition applied to human movements, in quadrupeds, the amble is a faster version of the walk, with the slight difference that they tend to have more weight distribution on two limbs rather than three at a given moment. Different from the walk, in the amble, the animal always has one foot off the ground. This is because each front leg anticipates its lift, shifting just before the back leg lands to just after the back leg rises. The movements of the back and front legs on one side become almost simultaneous at a higher speed. The amble is a more natural gait for elephants and horses, and it is often used as a transitional gait in other animals. It can also be used in animals that have been trained to do so, as in the case of some dogs. In the case of elephants and other large mammals, this is also their “running” gait, as they are too heavy to have all four limbs off the ground as other gaits require.
Ambling gaits also have variations, with a lateral or a diagonal version of this gait. Lateral ambling gaits follow a foot pattern that is like the walk, with the back leg substituting the front leg on the same side.
Footfall order: BL → FL → BR → FR
(Same as the walk, but different timings)


Source: https://youtu.be/JrAlxe3SRiw

Slow motion

An example of amble in elephants

Source: https://youtu.be/LTHzlUQDGmc

Slow motion
THE DIAGONAL AMBLE
In the diagonal amble, the back leg is instead kicking in sync with the opposite front leg, but the speed and rhythm don’t seem to change from the lateral amble. This version tends to be more stable than the lateral amble as the two legs on the ground are not both on the same side. In the diagonal amble, the center of gravity always falls in the middle of two feet. In my observations, the diagonal amble and diagonal walk are used by climbing mammals, like lemurs and chimpanzees, probably because it’s easier to control their weight distribution and avoid falling from branches and rocks.
Footfall order: BL → FR → BR → FL
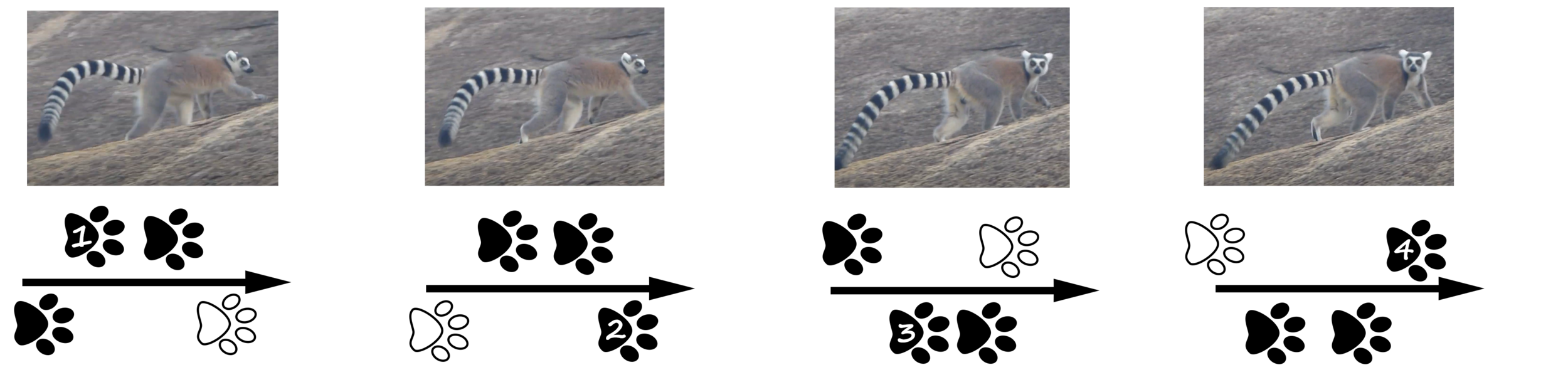

Source: https://youtu.be/U2iV9R0sptk

Slow motion
TROT
With the trot, the animal begins to gain some speed, although still not committed to running, and maintains an energy-efficient approach. We can compare it to the human version of jogging—midway between walking and sprinting.
Much like jogging, it’s the preferred way to cover longer distances in a relatively short time, in contrast to the gallop, in which a lot of energy is consumed in short bursts for a limited period of time. In a trained horse, a trot can be sustained potentially for hours.
The trot is a two-beat gait that follows a diagonal pattern, with the opposing limbs diagonally hitting the ground simultaneously and then alternating.
Footfall order example: BR and FL → BL and FR
The trot is also one of the most stable gaits as, similar to the diagonal amble, the center of gravity is always at the midpoint between the feet on the ground. A peculiarity of this gait is that with the limbs leaving and touching the ground at the same time, the animal’s body tends to have a slight bounce, dropping between beats and bouncing back up as the next contact with the ground occurs. If you focus your view on the diagonal limbs in the video, you can see them moving in synchrony.


Source: https://youtu.be/oyTKvsnbCcE

Slow motion
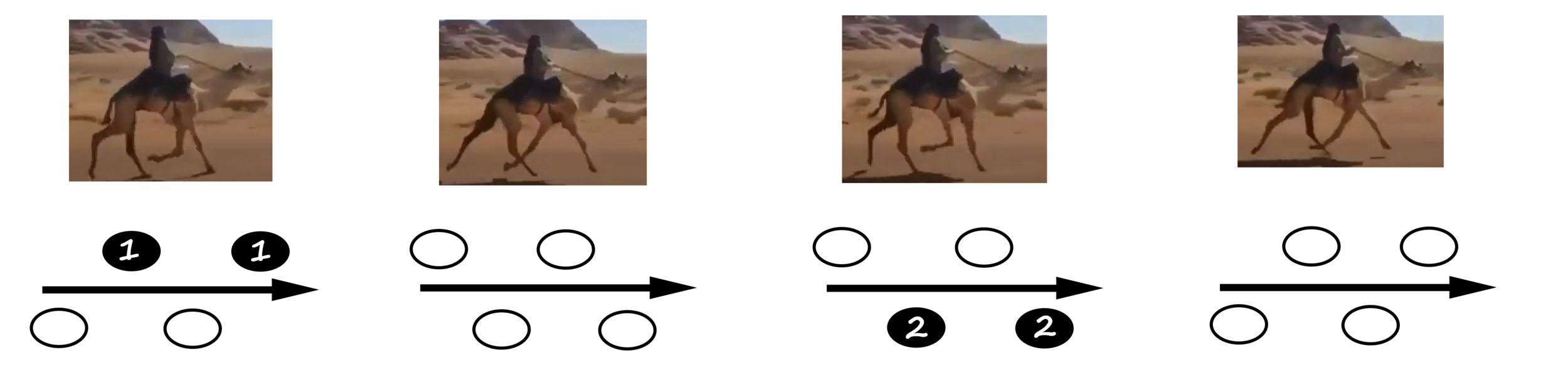
PACE
Most domestic animals naturally prefer to trot, but there are some exceptions in which animals will gravitate toward the pace—usually when they are tired—and a small percentage use the pace as their natural gait. Camels, giraffes, and bears are among those who naturally prefer to pace. For the most part, the pace is used by animals who have long legs, apparently as they are more likely to tangle them in a trot. Both gaits share the same general speed range.
The pace is another two-beat gait like the trot but with the fundamental difference of using the two limbs on the same side rather than diagonally.
Footfall order example: BL and FL → BR and FR
Like the trot, the pace can be used with some range of speed, and naturally, as the speed increases, the moment of suspension between beats will increase as well.

Source: https://youtu.be/oyTKvsnbCcE

Slow motion
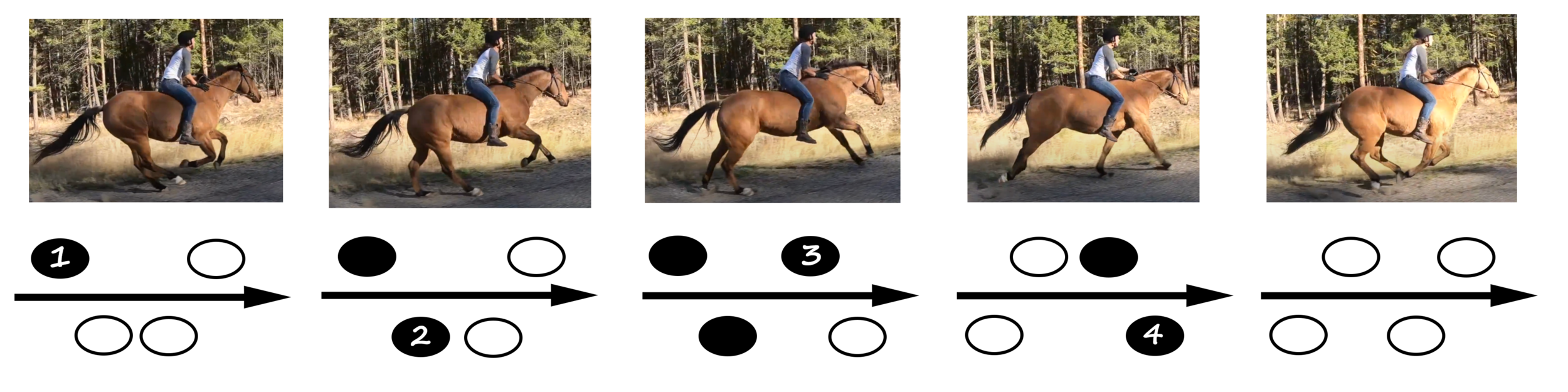
CANTER
The canter is a three-beat gait that falls between the trot/pace and the gallop in terms of speed, and this is also reflected in the sequence of footfalls. With three beats on each stride, the canter is an asymmetrical gait, which means that each animal can have either a left or a right lead, depending on which front limb is leaving the ground last on each stride. In the canter, we find the rhythm of beats as one-two-one, followed by a suspension where all feet have left the ground. As the speed increases, the period of suspension lengthens until the animal reaches a speed where it is forced to switch to a full gallop.
You can usually recognize a more accentuated rocking from the back to the front of the torso of the animal during this gait as the landing limbs follow a progression from back to front.
Footfall order example:
BL → BR and FR → FL (Left lead) → Suspension
BR → BL and FL → FR (Right lead) → Suspension


Source: https://youtu.be/jtPAy3yXeCo

Slow motion
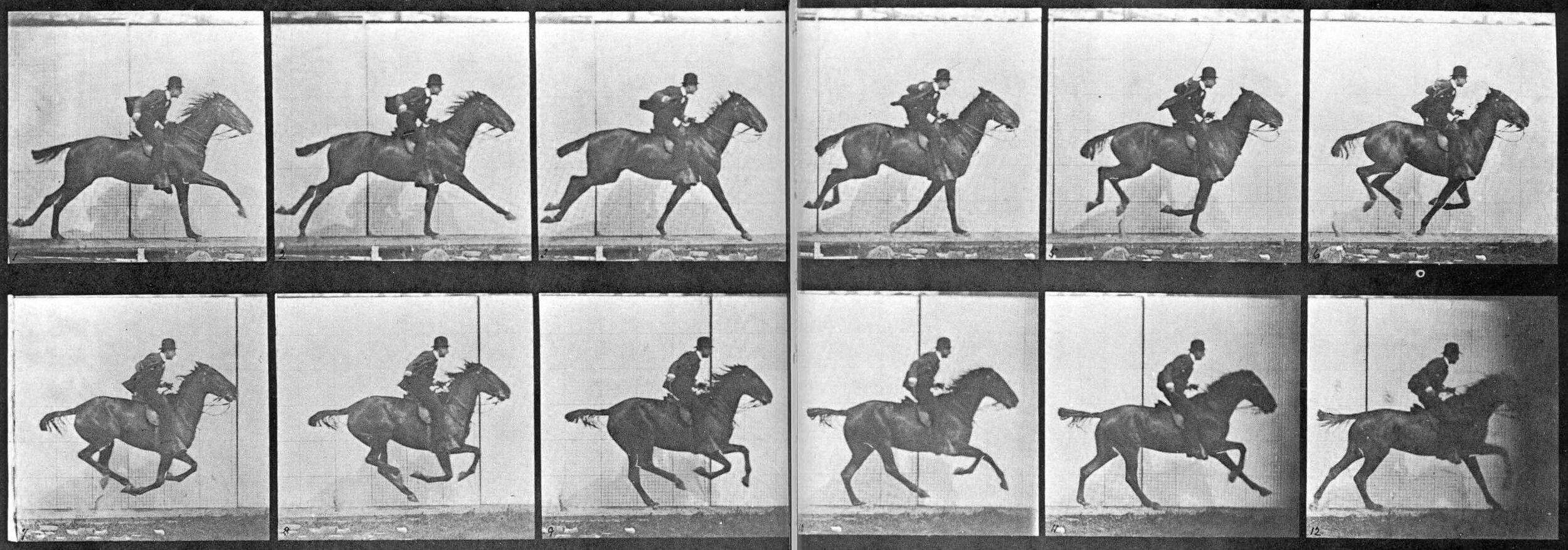
GALLOP
The gallop is the fastest gait; each stride can cover more ground than in other gaits, but the high energy requirement makes it less useful for traveling long distances.
The footfall is an evolution of the canter and its natural progression, except that the gallop becomes a four-beat gait. Each footfall becomes equidistant from the others and is always followed by a moment of suspension at the end. The two back legs hit the ground first with slightly different timing, while the two in front follow in the same pattern immediately after.
In the gallop, we also see the greatest compressing and stretching of the trunk, with the tightest compression happening as the front limbs lift and the longest extension right before the front limbs land. Depending on the exact timing of landing all limbs, we have two types of gallop: a traverse and a rotatory version.
In the traverse gallop, the footfall follows a diagonal pattern with a left or right lead, as in the canter. The traverse gallop is the more natural progression from the canter and is used primarily by horses and other herbivores.
Footfall order:
BL → BR → FL → FR (Right Lead) → Suspension
BR → BL → FR → FL (Left Lead) → Suspension

Source: https://youtu.be/-CSx7GCpERM

Slow motion
The rotatory gallop follows instead a circular motion (as the name implies) and is more common in carnivores. Although dogs and other animals can use the traverse gallop, the rotatory variation remains their fastest choice (maybe due to having the double suspension time). Between the two styles of gallop, the rotatory version also seems to be the most demanding in terms of energy.
In the rotatory gallop, the back feet land first, one after the other, just like in the traverse, and it’s immediately followed by a moment of suspension. The first front limb to land in the second part of the stride is the one on the same side of the back foot that last left the ground, following a pattern of left, right, right, left. Once they reach the gallop, speed can only increase by increasing either the stride length or stride frequency.
Footfall order:
BL → BR → Suspension → FR → FL (Left Lead) → Suspension
BR → BL → Suspension → FL → FR (Right Lead) → Suspension


Source: https://youtu.be/-KheqfpUpr0

Slow motion
THE HUNTING GAME

When chasing prey or escaping a predator, maximum speed is just one variable. Acceleration and turning angles are also tools to be considered in the evolutionary context. Being able to stalk prey without being spotted can change the dynamics of the hunt. Depending on your skill in getting closer to your prey before they notice, acceleration can have a much bigger impact than speed, and most animals are built for sprinting rather than endurance. If you’re the prey, quickly putting yourself out of harm’s reach can discourage the predator. If you’re the predator, quick acceleration can allow you to capture your prey before they have time to react.
Once the chasing phase of the hunt is on, your turning angle is a tactic that can help you escape your pursuer. If the predator is gaining on you, your best bet may be a sudden change of direction. The higher your speed, the wider the turning angle will be; a sharp turn will help distance you from the predator, thus giving you a momentary advantage. This strategy can be counter-productive if the predator is too far behind you. In that case, if you suddenly switch direction, the predator has time to adjust their trajectory and cut the corner, giving them the advantage.
The type of gallop and the leading foot gives you a preferred side and a sharper turning angle. A left lead will naturally lend itself to a left turn, and the same for the other side; the animal will naturally switch lead depending on which side it needs to turn. In a chase, if you turn in the opposite direction of the foot lead of the predator, it will give you even more advantage. Frantically changing direction is usually the prey’s last resort to have a shot at escape when the predator is closing in. The hopping gait of deer and rabbits naturally lends itself better for a direction change.
Generally, smaller animals, like rabbits and mice, tend to run in short bursts with the aim of finding quick refuge from a predator. Their scale doesn’t allow winning a speed contest.

Source: https://youtu.be/xaV1_M2j200

Source: https://youtu.be/EcgJPDxwKNI

(Notice that the arrows are exactly the same left and right, but the red arrow has shifted back on the right side.)
GAIT VARIATIONS
The basic gaits we’ve analyzed are generalizations of the complexity that is always present in nature. Whether human or animal, gaits invariably present some irregularity and individuality when observed closely. Gait variety may depend on individual body shape, body malfunctions, how they first learned locomotion, the presence or absence of training, subjective preferences, energy levels, etc. The aim here was to outline a general guide to better understand what to look for in your analysis and to give each gait some context.
That’s to say that you should always rely on studies, reference photos, and this page to better observe what affects the body's form so that your work has a believable quality, which is different from perfection.
Imperfections keep things interesting. Always trust your eyes more than what you read on the internet!

YOU MAY ALSO ENJOY:

In this article will focus on understanding the anatomy of the wing that propels flight and the basics of aerodynamics that make flying a reality. We cover the different flight patterns and break down the three stages of flight: lift-off, flying, and landing.

Synchronized Walking
Usually, we tend to mimic and mirror another’s posture and body language subconsciously when we’re talking with another person, especially if we are engaged in the conversation. But this can happen also while walking. When two people are walking down a street and are interacting with each other they tend to synchronize their steps more often than random chance would allow.
Bibliography and references
Muybridge, Eadweard. Animals in Motion. Published: 1899.
Denny, Mark; McFadzean, Alan. Engineering Animals. Published: 2011.
Timothy M. Griffin, Russell P. Main, Claire T. Farley. Biomechanics of quadrupedal walking.https://jeb.biologists.org/content/207/20/3545
Pierre Lemelin, Daniel Schmitt, and Matt Cartmill. Footfall patterns and interlimb co-ordination in opossums. Published: 2003.
D.C. Kar , K. Kurien Issac , K. Jayarajan. Gaits and energetics in terrestrial legged locomotion.
Michael C. Granatosky, Aidan Fitzsimons, Angel Zeininger, and Daniel Schmitt. Mechanisms for the functional differentiation of the propulsive and braking roles of the forelimbs and hindlimbs during quadrupedal walking in primates and felines.
Zeeshan Bhatti, Ahmad Waqas, Abdul Waheed Mahesar. Gait Analysis and Biomechanics of Quadruped Motion for procedural Animation and Robotic Simulation. Published: 2017.
Timothy E. Higham, Matthew S. Davenport and Bruce C. Jayne. Maneuvering in an arboreal habitat. Published: 2001.
Mark W Westneat. Vertebrate Functional Morphology and Physiology. Published: 2001.
Daniel Schmitt, Matt Cartmill, Timothy M. Griffin, Jandy B. Hanna and Pierre Lemelin. Adaptive value of ambling gaits in primates and other mammals. Published: 2006.
R. McNeill Alexander. Optima for animals. Published: 1982.
R. McNeill Alexander. Energy-Saving Mechanisms in Walking and Running. Published: 1991.
Kardong, V. Kenneth. Vertebrates: Comparative Anatomy, Function, Evolution. Published: 1994.
R. McNeill Alexander. Principles of Animal Locomotion. Published: 2003.
https://en.wikipedia.org/wiki/Gait
Gait footfall patterns:
http://vanat.cvm.umn.edu/gaits/info.htmlhttps://en.wikipedia.org/wiki/Animal_locomotion
https://en.wikipedia.org/wiki/Ambling_gait
https://en.wikipedia.org/wiki/Trot
https://youtu.be/f0pl9duYpvw
https://www.youtube.com/watch?v=b1xsCWMqlrQ
https://en.wikipedia.org/wiki/Horse_gait
https://en.wikipedia.org/wiki/Canter_and_gallop
https://en.wikipedia.org/wiki/Rotating_locomotion_in_living_systems
https://en.wikipedia.org/wiki/Terrestrial_locomotion
https://en.wikipedia.org/wiki/Tendon
https://jeb.biologists.org/content/221/2/jeb162917
Tracy Gantz. LEAD CHANGES: How Lead Changes Can Affect Performance.https://www.toconline.com/publicationsmedia/article-archives-2/racing-your-horse/lead-changes/#:~:text=Changing%20leads%20comes%20naturally%20to%20horses.&text=In%20other%20words%2C%20turning%20left,leading%E2%80%9D%20him%20around%20the%20turn.
Pictures:
Siberian Husky Malamut Dog by Andrea Stöckel
https://www.publicdomainpictures.net/en/view-image.php?image=310589&picture=siberian-husky-dog-pet
Cheetah Run by DrZoltan
https://pixabay.com/photos/cheetah-africa-namibia-cat-run-2859581/
Horse run by SoapWitch
https://pixabay.com/photos/horse-herd-dust-nature-wild-430441/
Muybridge horse gallop
https://commons.wikimedia.org/wiki/File:Muybridge_horse_gallop.jpg
Cheetah hunting by jc112203
https://pixabay.com/photos/cheetah-gazelle-hunting-running-1308943/
Greyhound by herbert2512
https://pixabay.com/photos/dog-greyhound-pet-animal-portrait-3682139/
Two horses by Alberto De quevedo
https://unsplash.com/photos/1FEmYYaOaq8
https://www.photojoiner.net/ for the photo edit
{kind=link}